CuriousTab |
CuriousTab
Discussion
Home ‣ Digital Electronics ‣ Memory and Storage See What Others Are Saying!
- Question
Options- Correct Answer
- True
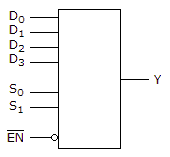
- 2. The device shown here is most likely a ________.
Options
Discuss
- 3. The symbol shown below is for a 2-input NAND gate.

Options
Discuss
- 8. Determine the values of A, B, C, and D that make the product term
 equal to 1.
equal to 1.
Options
Discuss
More questions
Correct Answer: multiplexer
Correct Answer: False
Correct Answer: A = 0, B = 1, C = 0, D = 1
Comments
There are no comments.